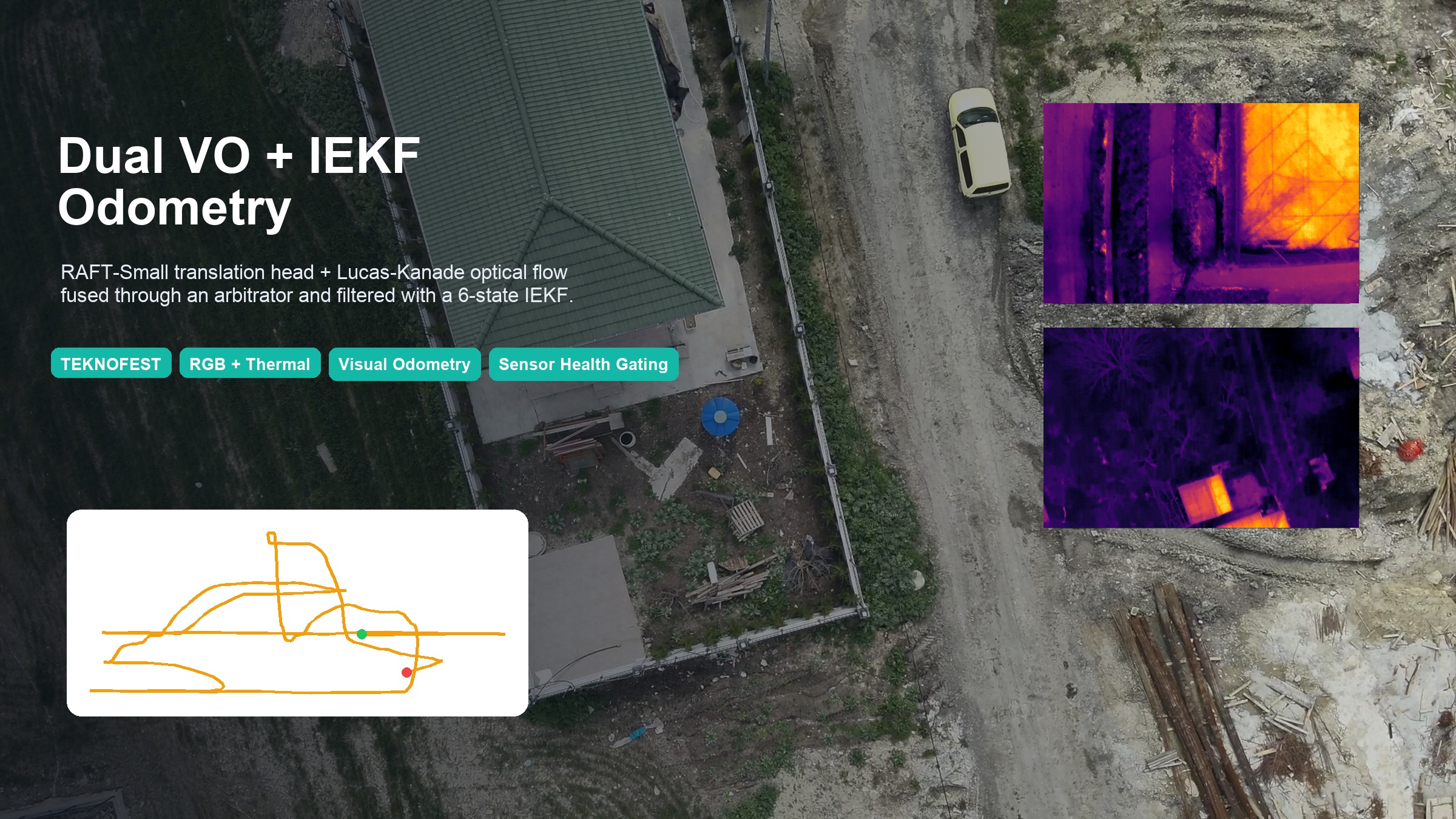
Hibrit Görsel Odometri Sistemi
RAFT optik akışını ORB tabanlı klasik bir dal ve güven skoruna göre seçim yapan bir yapı ile birleştiren iki başlı bir görsel odometri mimarisi denedim.
Dal
0
RAFT + ORB
Seçici
Güven
Tahmin yönlendirme
Çıktı
Pose
Trajektori tahmini
Proje Galerisi
1/7
Problem
Tek yöntemli görsel odometri; alan değişimi, doku farklılığı, hareket bulanıklığı ve belirsiz optik akış tahminlerinde zayıflayabiliyor.
Zorluk
Sistem, öğrenilmiş akış ile klasik özellikler arasında seçim yapabilen ve hiçbir dalı her zaman güvenilir kabul etmeyen pratik bir karar mekanizmasına ihtiyaç duyuyordu.
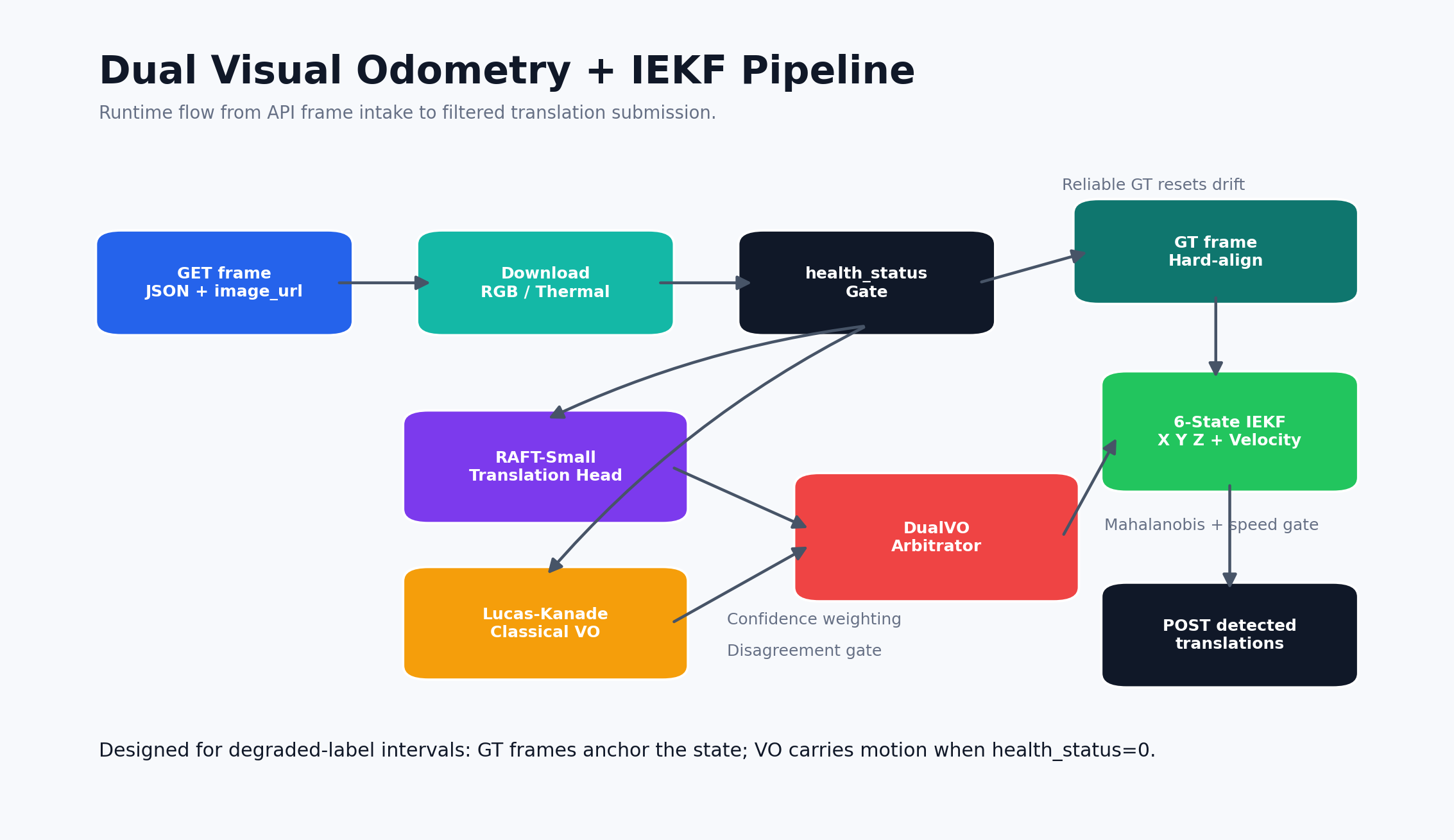
Mimari
Parçalar nasıl bir araya geliyor?
RAFT dalı yoğun hareket tahmini yapar, ORB dalı özellik tabanlı poz sinyali üretir ve güven skoruna duyarlı seçici nihai poz tahminini belirler.
Mimari Görünüm
Sistem yapısı ve karar akışı
RAFT Dalı
Yoğun optik akış ve öğrenilmiş hareket ipuçları.
ORB Dalı
Özellik eşleştirme ve klasik poz sinyali.
Güven Seçici
Nihai poz tahminini dal güvenilirliğine göre yönlendirir.
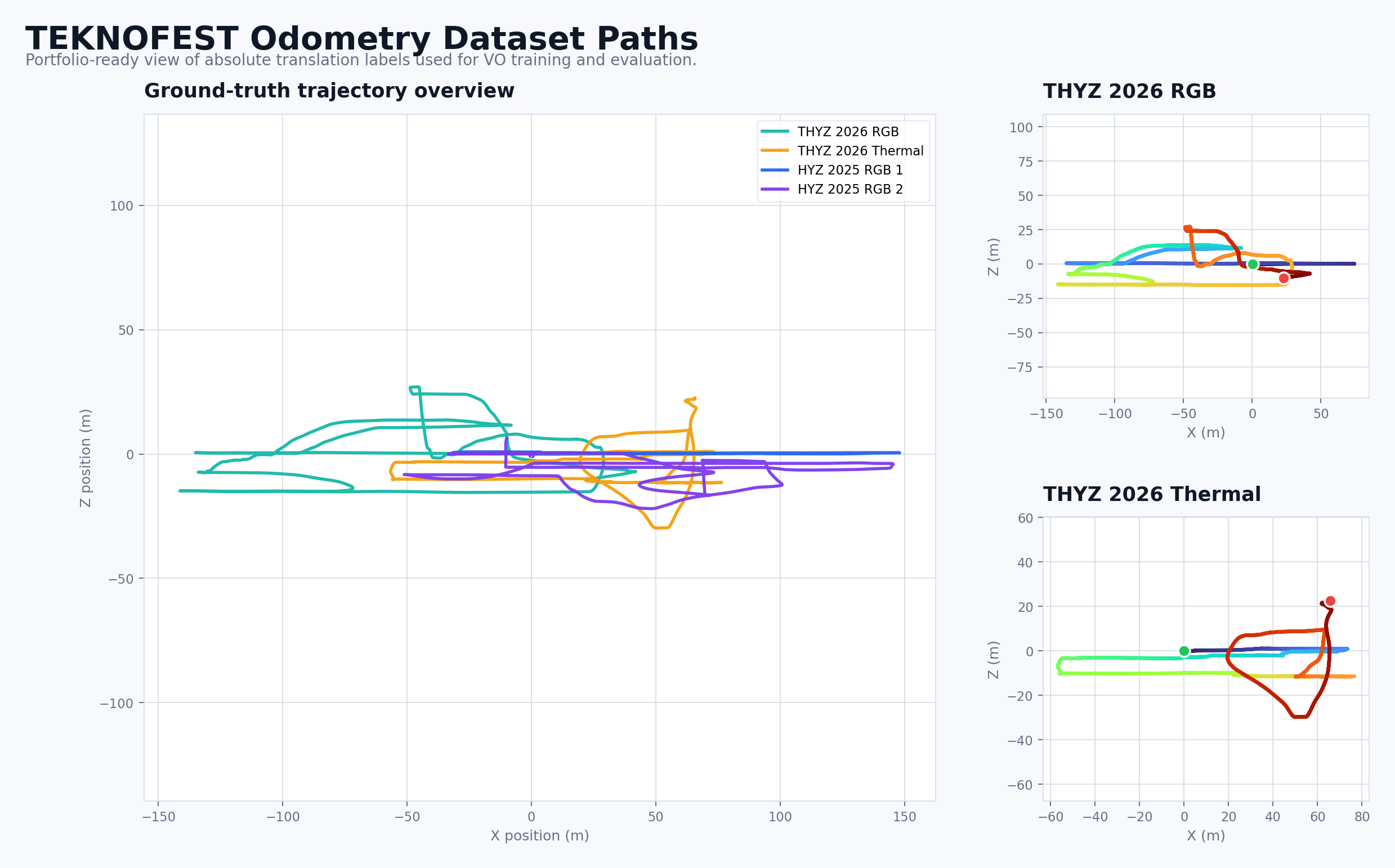
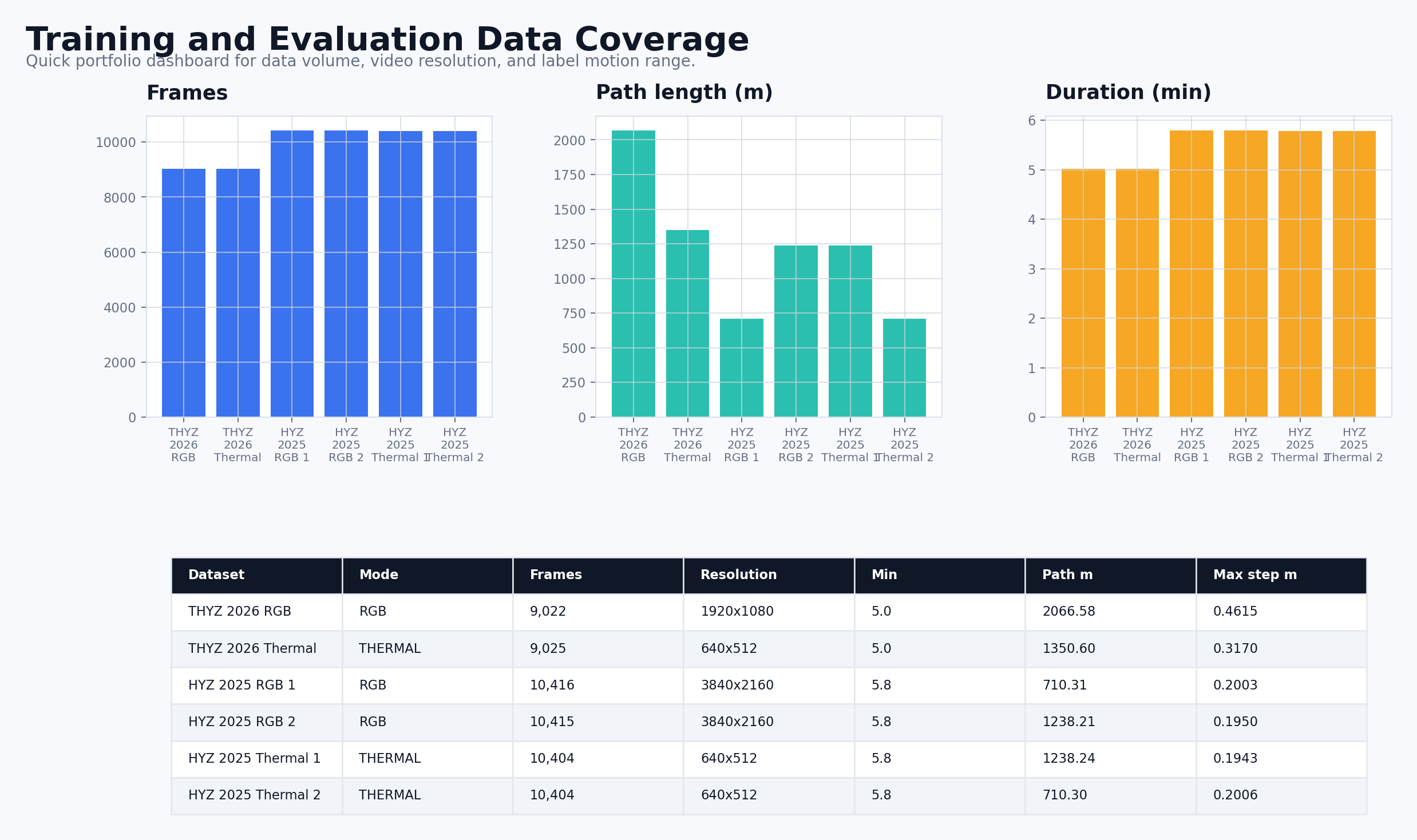
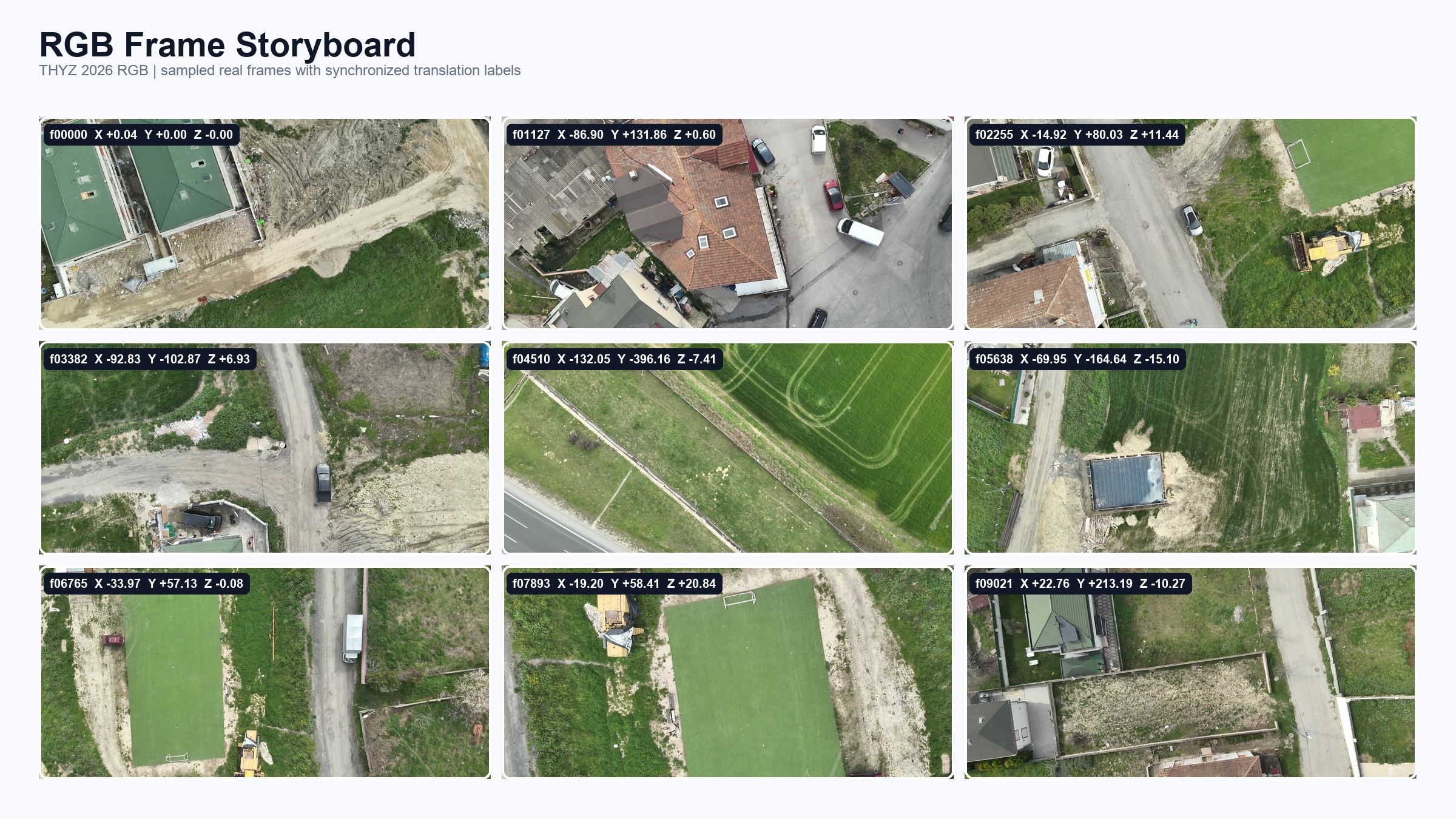
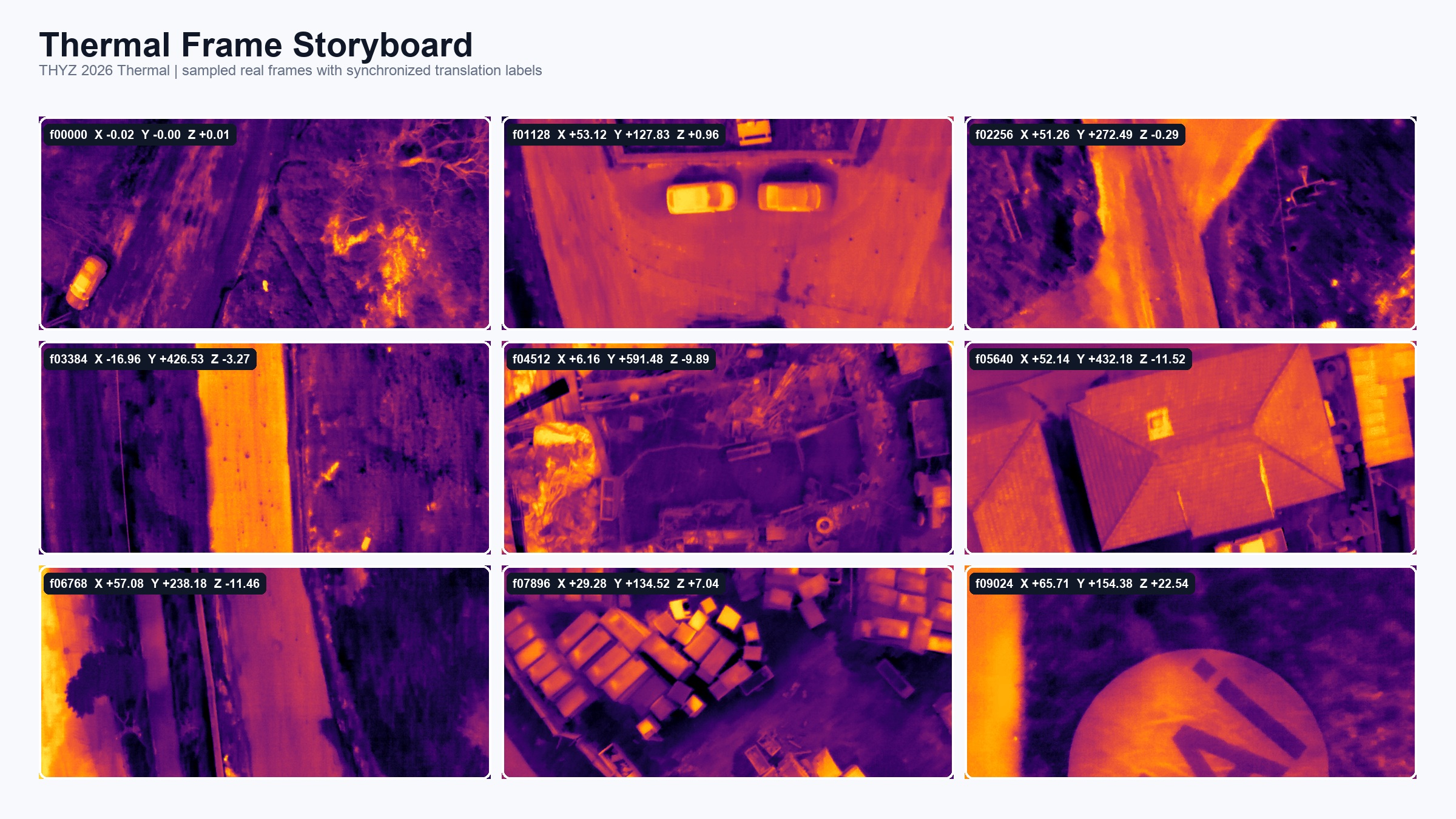
Veri Seti / Girdiler
- Yoğun optik akış, özellik eşleşmeleri ve poz tahmini davranışını karşılaştırmaya uygun hareket ipuçları içeren kare dizileri.
Teknik Kararlar
- Seçimden önce öğrenilmiş ve klasik dalları bağımsız tuttum.
- Dal güvenini yalnızca log değeri değil, karar mekanizmasının ana sinyali olarak ele aldım.
- Nihai poz tahminine geçmeden önce hareket tutarlılığını karşılaştırdım.
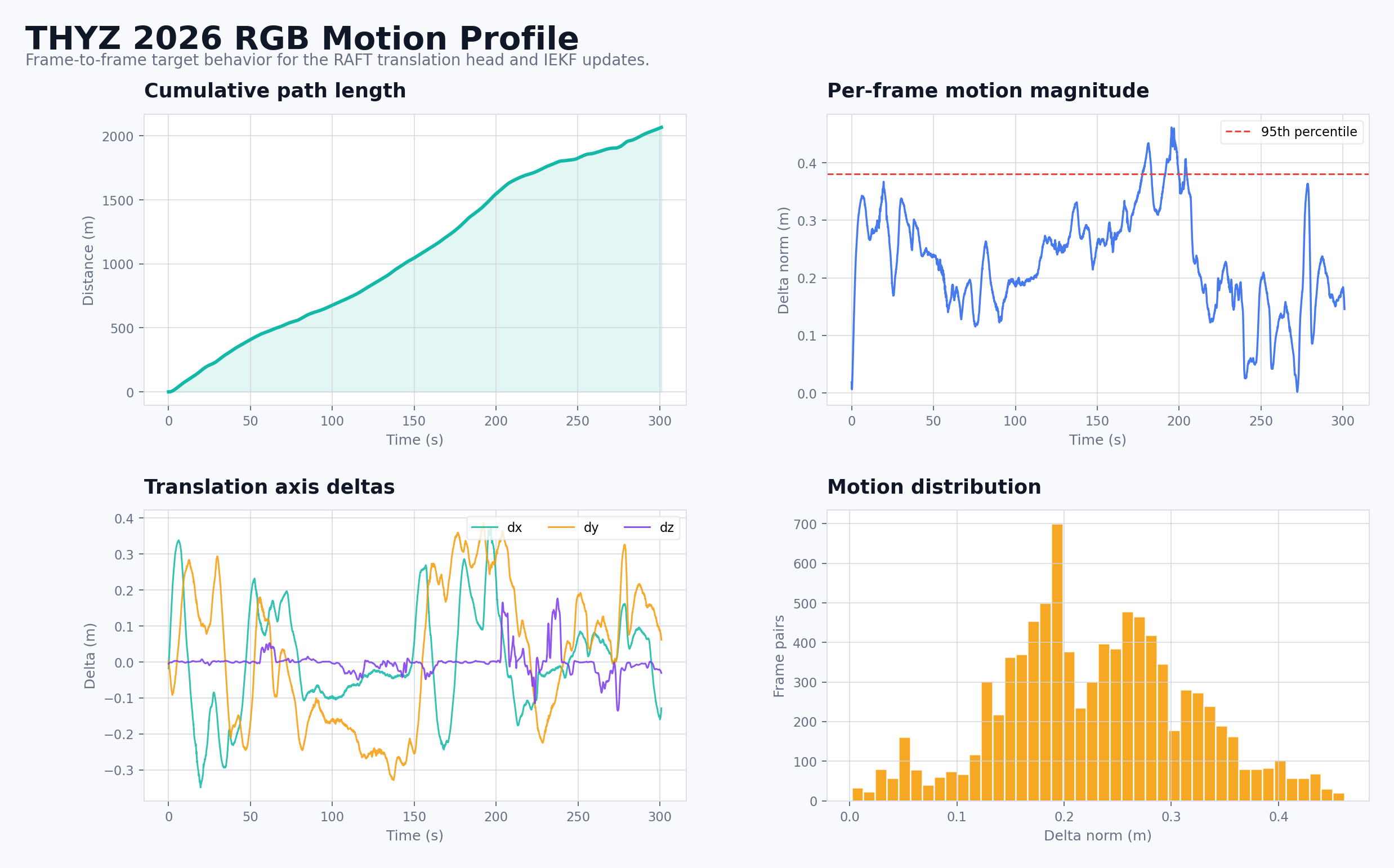
Uygulama Detayları
- RAFT ardışık kareler arasında yoğun optik akış tahmin eder.
- ORB klasik poz sinyali için anahtar nokta çıkarır ve eşleştirir.
- Güven seçici, daha güçlü tahmini nihai poz hesaplamasına yönlendirir.
Metrikler / Sonuçlar
- Hibrit yapı; dal güveni, hareket tutarlılığı ve nihai trajektori stabilitesini karşılaştırmak için kontrollü bir araştırma yolu oluşturdu.
Çıkarımlar
- Hibrit sistemler, hata modları birbirini tamamladığında değerli hale gelir.
- Güven tahmini, ham dal başarımı kadar önemlidir.
- Klasik bilgisayarlı görü, yorumlanabilir bir yedek dal olarak hâlâ güçlüdür.
Gelecek İyileştirmeler
- Trajektori seviyesi smoothing ve bundle adjustment denemeleri eklemek.
- Seçim mantığını hareket bulanıklığı ve düşük doku içeren sahnelerde karşılaştırmak.
- Dal güvenini ayrılmış sahne koşullarıyla kalibre etmek.